
RoboZoom Academy
Пропустить доступные курсы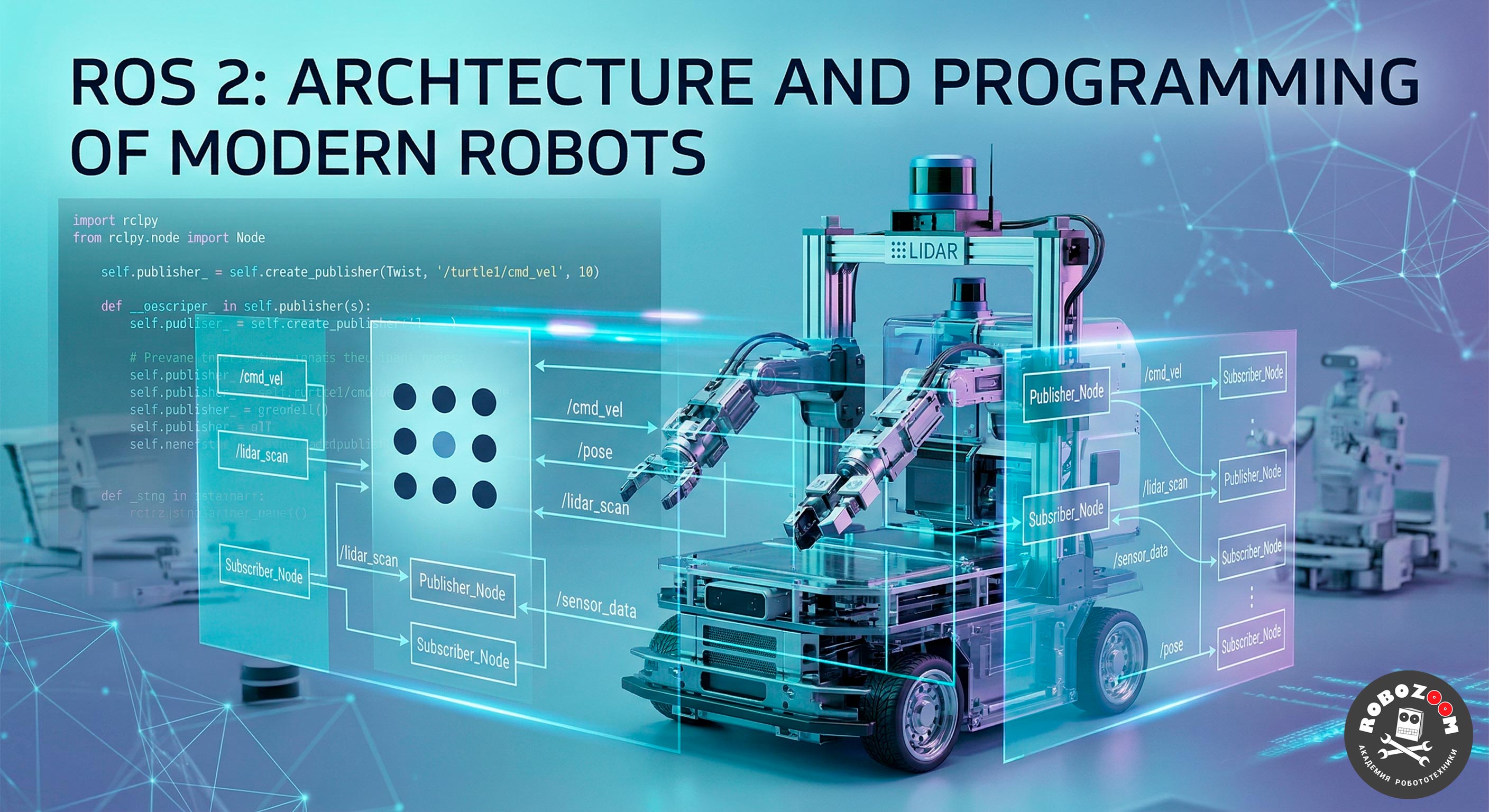

Доступные курсы
Современная робототехника давно ушла от написания монолитного кода. Сегодня "мозг" любого коммерческого робота - это распределенная сеть независимых микросервисов, которые обмениваются гигабайтами данных в реальном времени.
В рамках этого курса вы освоите ROS 2 (Robot Operating System) - главный мировой индустриальный стандарт для разработки беспилотников, манипуляторов и автономных систем. Вы пройдете путь от понимания архитектуры событийно-ориентированных фреймворков до написания собственных программных узлов (Nodes) на Python.
Что вас ждет внутри:
Никакой настройки окружения на вашем ПК. Каждому студенту предоставляется изолированная облачная Linux-среда с уже настроенным фреймворком. Доступ — прямо из браузера.
Микросервисный подход. Изучение концепции Издателей (Publishers) и Подписчиков (Subscribers).
Много практики. Отправка управляющих команд, сбор телеметрии, работа с радарами и визуализация графов сообщений.
Вы заложите прочный инженерный фундамент, который позволит вам уверенно стартовать в востребованной профессии ROS-инженера и перенести написанный код с симуляторов на реальное железо.
Готовы оживить свой первый механизм? Переходите к первому занятию!
- Учитель: Михаил Гранатов
- Учитель: Григорий Сизиков
Вы уже умеете создавать программные узлы и понимаете событийно-ориентированную архитектуру. Пора переходить от базовых команд к созданию по-настоящему умных автономных машин.
Вторая ступень курса погружает вас в задачи уровня Middle-инженера. Мы разберем, как роботы "видят" окружающий мир, как принимают решения в непредсказуемой среде и как перенести написанный софт на реальное железо. Вы освоите индустриальный навигационный стек Nav2, научитесь работать с лазерными дальномерами и компьютерным зрением.
Что вас ждет внутри:
Профессиональная 3D-симуляция. Ваша облачная среда теперь интегрирована с продвинутыми физическими движками (Gazebo). Вы будете тестировать алгоритмы в виртуальных лабиринтах без нагрузки на ваш личный ПК.
Сложная автономность. Глубокое погружение в SLAM (построение карт неизвестных помещений), карты стоимости (Costmaps) и алгоритмы поиска пути (Path Planning).
Органы чувств робота. Интеграция и фильтрация данных с LiDAR-сенсоров, а также связка ROS 2 с OpenCV для обработки видеопотоков в реальном времени.
Переход на "Железо" и RoboDevOps. Специфика запуска узлов на одноплатных компьютерах (Raspberry Pi), интеграция микроконтроллеров (Micro-ROS) и упаковка готового "мозга" робота в надежные Docker-контейнеры.
Итогом курса станет ваш дипломный проект: разработка полного программного стека для Автономного Мобильного Робота (AMR), способного самостоятельно ориентироваться и достигать целей в динамической среде.
Готовы наделить своего робота настоящим интеллектом? Переходите к продвинутому блоку!
- Учитель: Михаил Гранатов
Название курса: Встраиваемые системы и мобильная робототехника: Платформа Remote Titan Краткое название: Робототехника (72ч)
Описание: Этот курс — твой пропуск в мир реальной инженерии. За 72 занятия ты пройдешь путь от мигания светодиодом до создания автономного робота с искусственным интеллектом. Мы не просто "играем в лего", мы работаем с настоящим железом и пишем код на языке C++, который используют профессионалы в Tesla и SpaceX.
Чему ты научишься:
🛠 Схемотехника: Поймешь, как работают транзисторы, драйверы моторов и оптические датчики.
💻 Программирование: Освоишь язык C++ и среду Arduino IDE (циклы, функции, прерывания, массивы).
🤖 Алгоритмика: Научишь робота принимать решения, ориентироваться в лабиринте и видеть объекты.
🧠 Теория управления: Узнаешь, что такое ПИД-регулятор и почему роботы без математики падают.
Твой инструмент — робот Remote Titan: В основе курса лежит плата Arduino Nano и набор профессиональных датчиков:
Аналоговые оптопары (энкодеры) — для точного контроля скорости.
Лазерные датчики препятствий (E18-D80NK) — промышленный стандарт "машинного зрения".
Массив датчиков линии (8 каналов) — для скоростных гонок по трассе.
Камера Pixy2 — нейросетевое зрение для распознавания цветов и штрих-кодов.
Финальный проект: Битва интеллектуальных роботов. Твой бот должен будет самостоятельно найти противника на ринге, проанализировать тактику и победить, не выехав за пределы поля.
- Учитель: Михаил Гранатов
Курс «Конструирование и основы робототехники» (3–5 лет) Возраст: 3–5 лет Формат: игровые занятия в малых группах Продолжительность занятия: 30–45 минут Уровень подготовки: не требуется О курсе Курс конструирования и робототехники для детей 3–5 лет — это первый шаг ребёнка в мир техники, логики и творчества. Занятия проходят в игровой форме и направлены на развитие мышления, мелкой моторики, речи и воображения через работу с конструкторами и простыми механическими моделями. Ребёнок учится собирать, анализировать, экспериментировать и объяснять, а не просто повторять действия взрослого. Цели курса развитие пространственного и логического мышления; формирование интереса к технике и инженерному творчеству; развитие мелкой моторики и координации; обучение работе по образцу и по собственному замыслу; развитие коммуникативных навыков и речи. Чему научится ребёнок В процессе обучения дети: различают формы, цвета и размеры; собирают простые конструкции по инструкции; создают собственные модели; знакомятся с базовыми механическими элементами (колёса, оси, шестерёнки); понимают причинно-следственные связи («нажал — поехало», «покрутил — повернулось»); учатся работать в команде и соблюдать правила. Что используется на занятиях крупные безопасные конструкторы; элементы с подвижными деталями; игровые задания и сюжетные истории; визуальные карточки и демонстрационные модели. Все материалы соответствуют возрасту и требованиям безопасности. Как проходят занятия Каждое занятие включает: Короткую игровую вводную часть Демонстрацию и обсуждение модели Самостоятельное конструирование Свободную творческую часть Подведение итогов в игровой форме Занятия проходят без перегрузки, в комфортном темпе, с постоянной поддержкой педагога. Результат обучения По окончании курса ребёнок: уверенно работает с конструктором; проявляет интерес к созданию новых моделей; становится более внимательным и усидчивым; развивает речь и способность объяснять свои действия; получает положительный опыт обучения и успеха. Почему этот курс важен В возрасте 3–5 лет закладываются основы мышления и интереса к обучению. Конструирование и робототехника в игровой форме помогают ребёнку развиваться гармонично, без давления, формируя уверенность в себе и любознательность.
- Учитель: Михаил Гранатов